

Ti piacerebbe avere il tuo personale rover per l’esplorazione di Marte (ma anche del giardino di casa propria), progettato dalla NASA? Ebbene, l’Agenzia spaziale statunitense lo scorso anno ha rilasciato un progetto realizzato dal JPL per costruire un piccolo rover esplorativo, concettualmente molto simile a Curiosity e Perseverance (magari con un’elettronica un po’ meno sofisticata), ideato dagli ingegneri del Jet Propulsion Laboratory a scopi dimostrativi ma perfettamente funzionante.
ROV-E, così si chiama il rover, è stato sviluppato pensando proprio per permettere a studenti e appassionati di realizzarlo ad un costo relativamente basso.
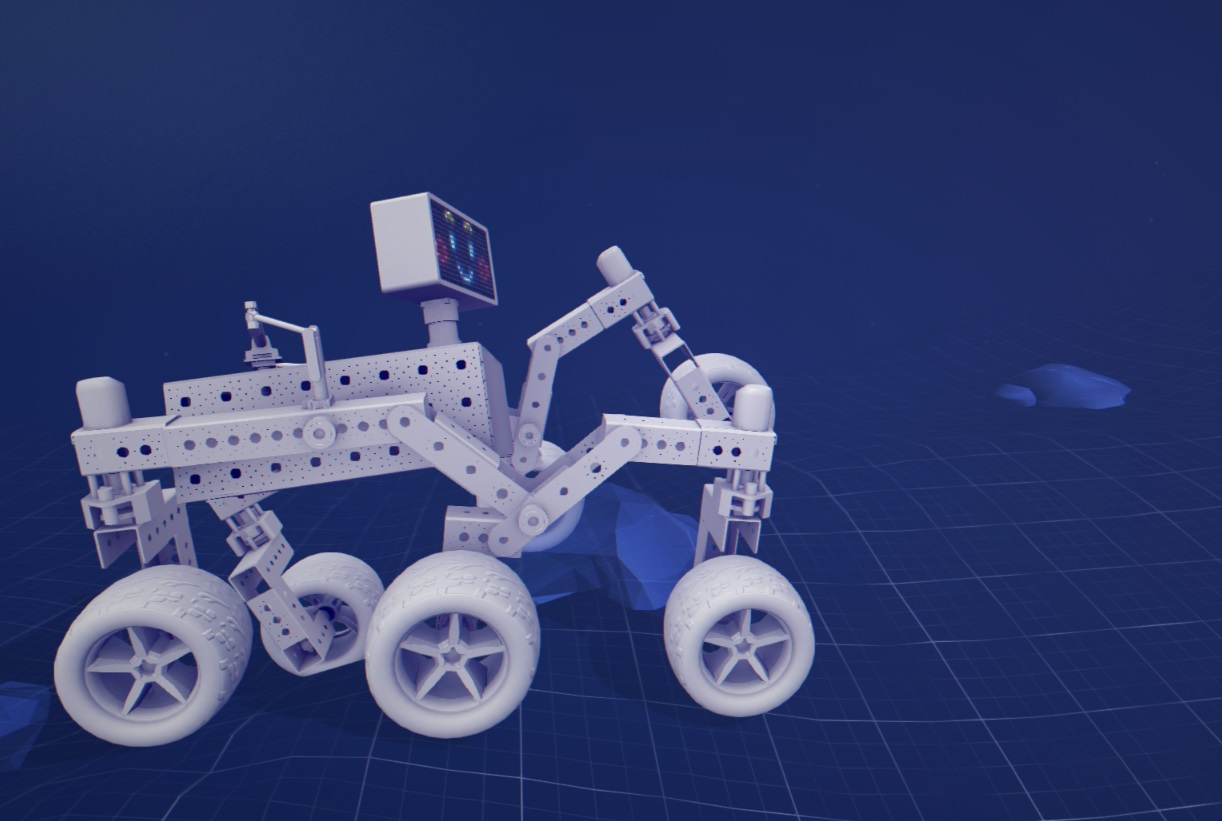 Il risultato è il JPL Open Source Rover (OSR), un rover dimostrativo che imita i sistemi chiave di Curiosity, relativamente semplice da assemblare utilizzando componenti facilmente reperibili.
Il risultato è il JPL Open Source Rover (OSR), un rover dimostrativo che imita i sistemi chiave di Curiosity, relativamente semplice da assemblare utilizzando componenti facilmente reperibili.
L’OSR utilizza sospensioni dello stesso tipo “Rocker-Bogie” installate su Curiosity, sterzo angolare e differenziale pivotante, permettendo il movimento su terreni accidentati, e il cervello è un Raspberry Pi. Tutte le parti che costituiscono ROV-E sono facilmente reperibili nei normali cataloghi di forniture elettroniche e nei negozi di ferramenta, ma, per montarlo, sarà necessario avere un set di strumenti di base: una sega a nastro per tagliare il metallo, un trapano, un saldatore, cesoie, chiavi inglesi, e così via.
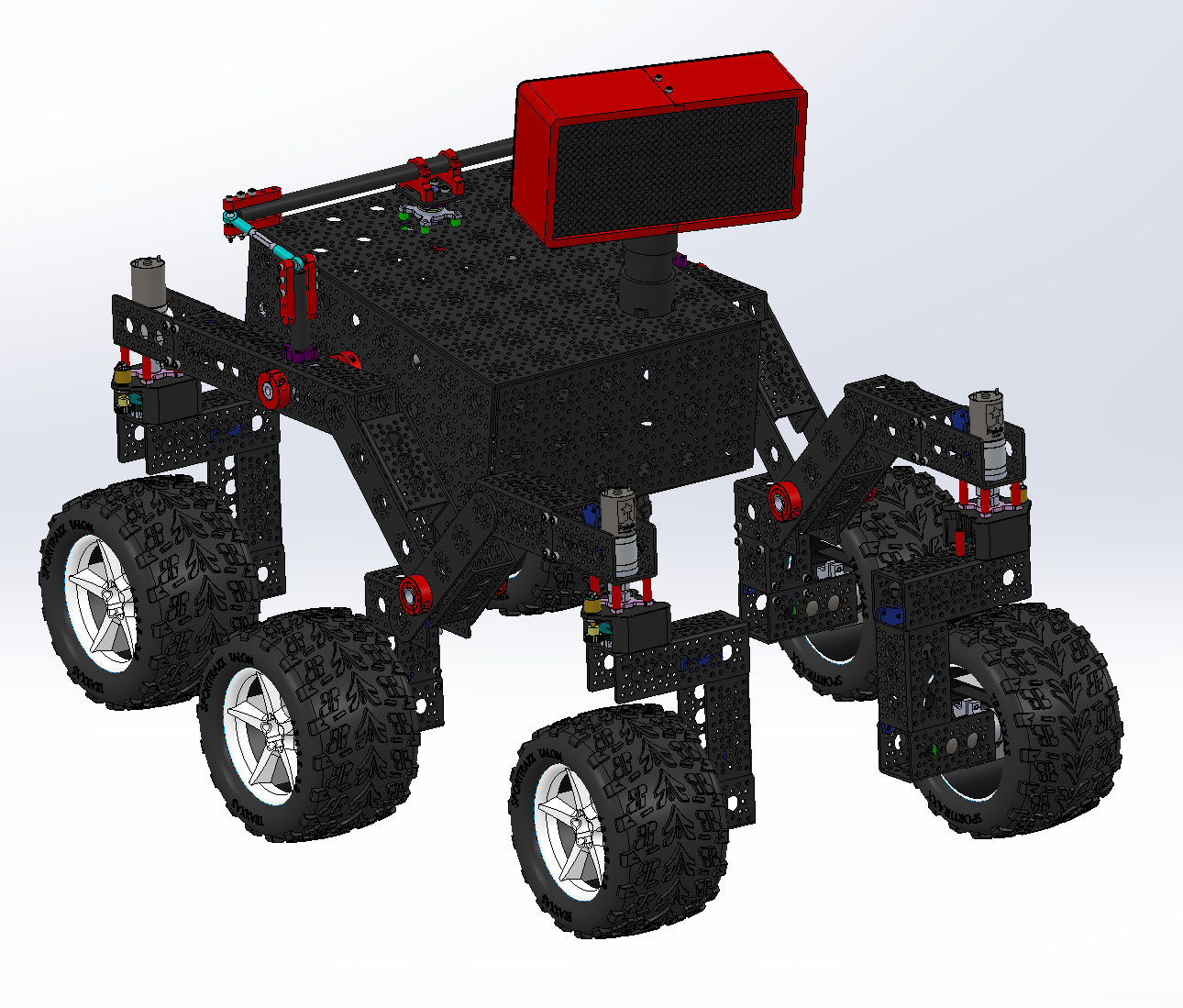
Il Rover Open Source è in scala 1:6 utilizza principalmente parti prefabbricate, anche se alcune di esse di esse dovranno essere lavorate per renderle confacenti al progetto. Ecco le caratteristiche più importanti:
| Attributo | Valore |
|---|---|
| Peso | 25 [libbre] |
| Orma | 24×14 [in] |
| Capacità della batteria | 5200 [mAh] |
| Tasso di scarica della batteria | 8 [A] |
| Assorbimento di corrente nominale | 1.2 [A] |
| Tempo di operatività | 5 [ore] (uso continuo) |
| massima velocità | 6.7 [cm / s] |
| Scala verticale massima 90 gradi | 12 [cm] |
| Differenziale di altezza massima tra i lati | 14 [cm] |
| Comunicazione (per progetto) | App Bluetooth (solo Android) e Xbox Controller |
Secondo i creatori del progetto rilasciato sulla pagina GitHub, la realizzazione completa e funzionante del rover richiede circa 200 ore di lavoro ad una persona con una certa pratica di assemblaggio e modellismo, quindi, probabilmente, è meglio preparasi a mettercene almeno il doppio.
Il progetto prevede anche una certa flessibilità per permettere di caricare app personalizzate, collegare payload e sensori al cervello e modificare i meccanismi come si vuole. Si tratta di un progetto open source ampiamente personalizzabile, quindi sarà possibile collegare telecamere e microfoni, oltre a sensori di vario tipo, ad esempio sensori di prossimità o un termometro per il rilevamento della temperatura.
È possibile scaricare tutte le specifiche di progetto qui.
La realizzazione del progetto rilasciato dalla NASA così com’è, tempo a parte, dovrebbe costare intorno ai 2000 euro.





































