


La NASA sta testando robot spaziali autonomi per costruire rifugi e pannelli solari sulla Luna e su Marte.
Con il programma Artemis, la NASA non sta solo cercando di riportare gli astronauti sulla Luna, ma spera di gettare le basi per stabilire una presenza a lungo termine sulla superficie lunare in modo da poter sviluppare la tecnologia necessaria per portare persone su Marte e oltre.
Se gli astronauti dovranno trascorrere lunghi periodi di tempo sulla Luna e su Marte, sarà necessario essere capaci di costruire e mantenere le infrastrutture localmente: saranno necessari habitat, centrali elettriche, torri di comunicazione, laboratori chimici e altro ancora.
La tecnologia ARMADAS della NASA
Saranno dei robot appositamente progettati a produrre tutto questo, infatti realizzare queste strutture sulla Terra e inviarle nello spazio sarebbe estremamente costoso. Per raggiungere questo scopo la NASA sta adottando un approccio nuovo, progettando un sistema robotico in grado di costruire autonomamente strutture extra-mondo da blocchi di base realizzati con risorse locali.
Questa tecnologia è chiamata ARMADAS (“Sistemi di assemblaggio digitale adattivo di missione riconfigurabile automatizzati“) e a gennaio e stato pubblicato un articolo su Science Robotics che descrive in dettaglio una dimostrazione dei robot.
Come funziona: la demo di ARMADAS ha coinvolto tre robot progettati per lo spazio: due robot costruttori (chiamati SOLL-E, “Scaling Omnidirection Lattice Locomoting Explorer”) e un robot di fissaggio (chiamato MMIC-I, “Mobile Metamaterial Internal Co-Integrator”).
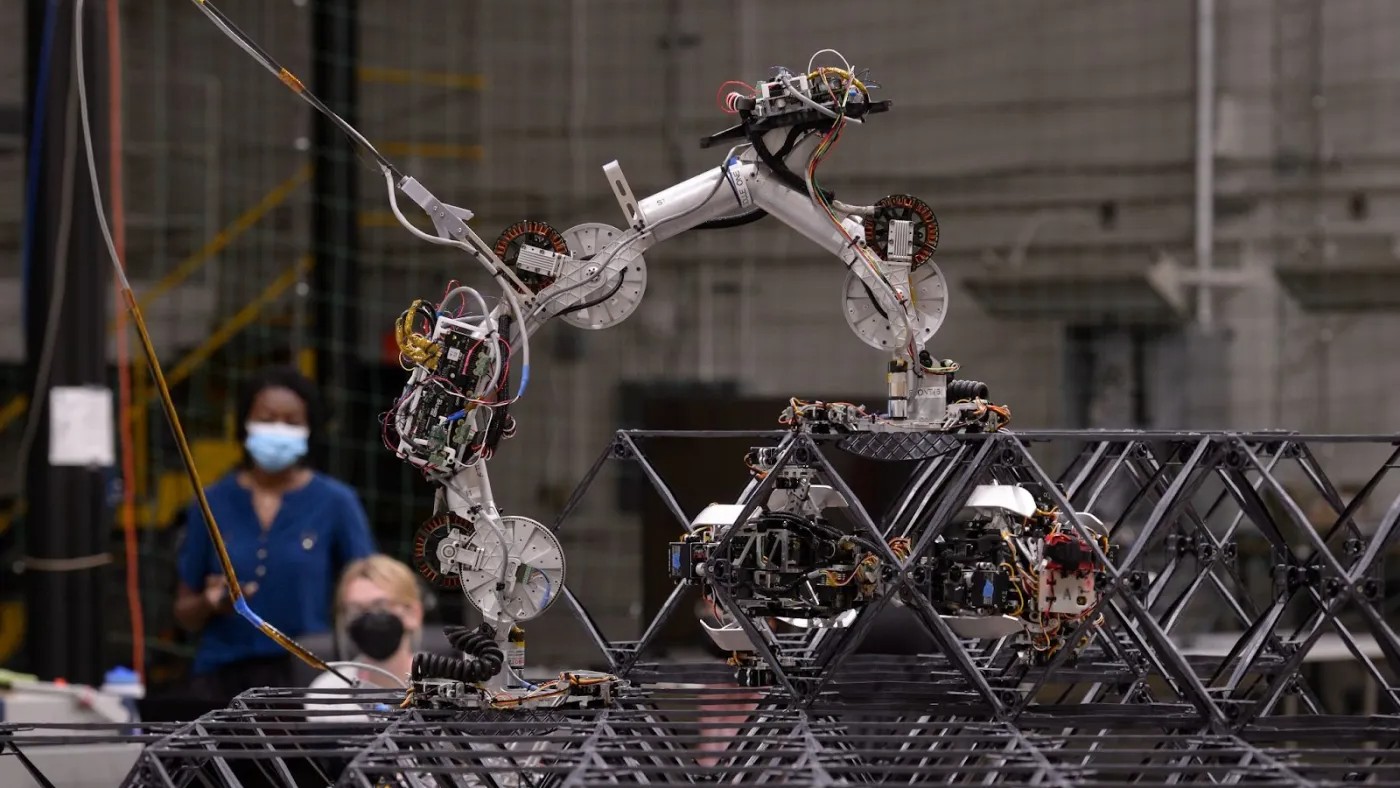
I SOLL-E hanno la forma di tubi arcuati e si muovono come vermi: l’estremità anteriore del tubo fa un passo avanti, quindi l’estremità posteriore segue l’esempio. Questi robot sono progettati per trasportare e posizionare blocchi di wireframe che la NASA chiama “voxel”.
“I voxel possono essere realizzati con molti materiali e processi di produzione diversi“, ha dichiarato Christine Gregg, ingegnere capo di ARMADAS. “Eventualmente, per le applicazioni spaziali, vorremmo creare voxel da materiali che troviamo in situ sulla Luna o su altri corpi planetari”.
Anche il robot MMIC-I si muove come un verme, ma è più corto dei robot SOLL-E e abbastanza piccolo da muoversi all’interno dei voxel. Dopo che un SOLL-E ha posizionato un voxel, il suo compito è fissare il blocco al resto della struttura.
Durante la demo, i tre robot spaziali hanno costruito un rifugio delle dimensioni di un capannone in 100 ore utilizzando 256 voxel. Sebbene la NASA abbia fornito ai robot i piani per il rifugio, non ha detto loro come costruirlo: i robot si sono affidati ad algoritmi software per individuare l’approccio migliore.
“Poiché i robot allineano ogni piccolo passo alla struttura in quella che è essenzialmente una griglia 3D, semplici algoritmi con bassi requisiti di calcolo e rilevamento possono raggiungere obiettivi di autonomia di alto livello”, ha affermato Gregg. “Il sistema costruisce e corregge gli errori da solo, senza visione artificiale o mezzi di misurazione esterni“.
Guardando al futuro: la NASA prevede di continuare a sviluppare i suoi ARMADAS, concentrandosi sull’addestramento dei robot spaziali per lavorare con diversi tipi di elementi costitutivi, tra cui schermature e pannelli solari.
“Realizzare strutture di grandi dimensioni partendo da piccoli blocchi ci consente di utilizzare buoni materiali al costo più basso“, ha affermato Kenny Cheung, ricercatore principale di ARMADAS. “La dimensione delle strutture che possono essere realizzate è limitata solo dal numero di elementi costitutivi che possono essere forniti”.




































{kind=link}