


L’esplorazione spaziale è una delle sfide più affascinanti e complesse che l’umanità si è posta, e per raggiungere e studiare i mondi lontani dal nostro, abbiamo bisogno di tecnologie avanzate e innovative, in grado di superare gli ostacoli e le difficoltà che si presentano in ambienti così ostili e sconosciuti, quindi perché non avere un cane robot?

Come detto, tra queste tecnologie, i robot giocano un ruolo fondamentale, sono infatti in grado di svolgere compiti che sarebbero troppo pericolosi, faticosi o impossibili per gli esseri umani, come ad esempio camminare su superfici irregolari, entrare in luoghi angusti, manipolare oggetti delicati o pesanti, resistere a temperature estreme o a radiazioni nocive.
I robot possono anche essere controllati a distanza dagli astronauti, che possono così avere una visione diretta e interattiva dei luoghi che stanno esplorando, senza dovervi mettere piede, questo permette di ridurre i rischi e i costi delle missioni spaziali, ma anche di aumentare le possibilità di scoperta e di apprendimento.
Tuttavia, controllare un robot dallo spazio non è una cosa semplice, ci sono infatti dei ritardi nella comunicazione tra il robot e l’astronauta, dovuti alla distanza e alla velocità della luce, e questi ritardi possono variare da pochi secondi a diversi minuti, a seconda della posizione relativa tra il robot e l’astronauta.
Questo significa che l’astronauta non può vedere in tempo reale quello che un eventuale cane robot sta facendo, ma solo con un certo ritardo, e ciò rende difficile coordinare i movimenti e le azioni del robot, soprattutto se questo deve interagire con altri robot o con l’ambiente.
Per superare questo problema, i ricercatori stanno sviluppando nuovi sistemi di controllo e di intelligenza artificiale, che permettano ai robot di agire in modo più autonomo e di cooperare tra loro, riducendo la dipendenza dall’astronauta. Questi sistemi devono essere in grado di adattarsi alle diverse situazioni e ai diversi robot, che possono avere forme, dimensioni, abilità e funzioni diverse.
Come siamo arrivati ad avere un cane robot?

Un esempio di questa ricerca è il progetto “Surface Avatar”, che ha come obiettivo di creare una piattaforma di controllo remoto per diversi tipi di robot, che possano essere usati per esplorare e costruire habitat su altri pianeti, come la Luna o Marte. Il progetto è coordinato dall’Agenzia spaziale europea (ESA) e coinvolge diversi partner, tra cui il Centro aerospaziale tedesco (DLR), l’Università di Bremen, l’Università di Roma “La Sapienza” e la società GMV.
Il progetto ha recentemente condotto un test di successo, in cui un astronauta dell’ESA, Marcus Wandt, ha controllato diversi robot sulla Terra, dalla Stazione spaziale internazionale (ISS) –che orbita attorno alla Terra a circa 400 km di altezza–. Il test si è svolto a gennaio 2024 e ha dimostrato la fattibilità e l’efficacia del sistema “Surface Avatar”.
Tra i robot controllati da Wandt, c’era un cane robot, o meglio, gli era simile, di nome Bert, creato dal DLR. Bert è considerato un cane robot in quanto ha quattro zampe, e può camminare su diversi tipi di terreno, anche quelli più accidentati o scivolosi, che potrebbero non essere accessibili con le ruote.
Il cane robot Bert può anche esplorare piccole caverne o anfratti, in cui potrebbero nascondersi delle sorprese scientifiche o dei pericoli. Il cane robot Bert è dotato di una telecamera, che trasmette le immagini a Wandt, che può così vedere quello che il robot vede, in più può anche ricevere dei comandi vocali da Wandt, che può così indicargli dove andare o cosa fare.
Bert è il primo cane robot a essere controllato da un essere umano al di fuori dell’atmosfera terrestre, prima d’ora solo i robot con ruote venivano controllati a distanza dallo spazio. Questo rappresenta una novità e una sfida, perché i cani robot, o i generici robot a quattro zampe, hanno una locomozione più complessa e dinamica, che richiede una maggiore coordinazione e precisione.
Oltre a quanto detto, i cani robot possono avere una maggiore espressività e personalità, che possono influenzare il rapporto con l’astronauta.
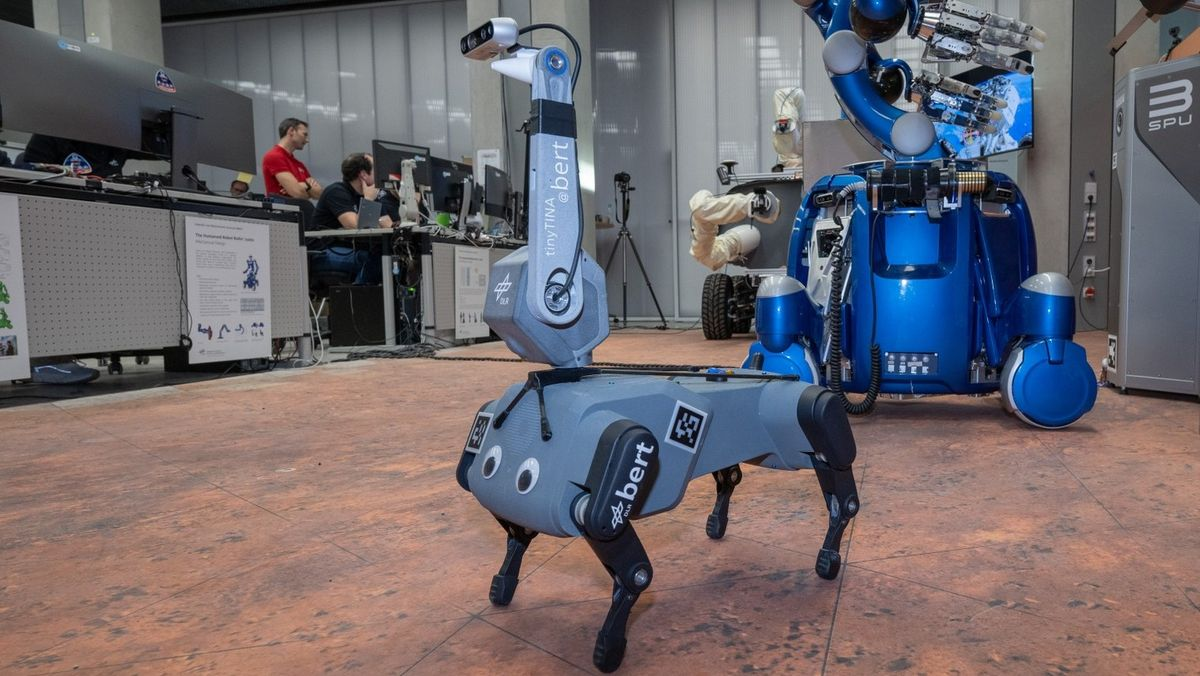
Mentre Wandt controllava il cane robot Bert, permettendogli di esplorare il laboratorio su Marte della DLR e monitorare il “terreno” con gli occhi della sua telecamera, ha anche rivolto la sua attenzione ad altri due robot: Rollin’ Justin della DLR, un robot di servizio umanoide, e il rover Interact dell’ESA.
Il cane robot e Rollin’ Justin hanno lavorato insieme per eseguire un compito, installando un corto tubo che rappresenta uno strumento di misurazione scientifica.
Questo compito richiedeva una cooperazione tra il robot umanoide e il cane robot, i quali dovevano coordinare i loro movimenti e le loro azioni, tenendo conto dei ritardi nella comunicazione con l’astronauta. Per farlo, i il cane robot e quello umanoide hanno usato dei nuovi algoritmi di controllo e di intelligenza artificiale, che permettono loro di stabilire degli accordi e di comprendere le intenzioni reciproche.
Questi algoritmi sono basati su una combinazione di tecniche di pianificazione, di apprendimento e di ragionamento, che consentono ai robot di adattarsi alle diverse situazioni e ai diversi robot.
Questo è il primo esperimento di questo tipo, che mostra come diversi robot possano formare una squadra e completare con successo un compito insieme, sotto la guida di un astronauta. Questo è molto utile quando si costruisce un habitat, ad esempio, perché si possono combinare le diverse abilità di diversi robot, che possono svolgere ruoli complementari e specializzati.
Controllare un robot con cui non ci si trova nemmeno sullo stesso pianeta è solo una parte dell’obiettivo del progetto “Surface Avatar”. L’obiettivo finale è infatti di consentire agli astronauti di controllare diversi robot in missione, facendoli agire in modo semi o completamente autonomo a seconda delle necessità. Questo permetterebbe agli astronauti di avere una maggiore flessibilità e una maggiore sicurezza, potendo scegliere il livello di intervento più adatto a ogni situazione.
“Le future stazioni sulla Luna e su Marte, compresi gli habitat degli astronauti, saranno costruite e mantenute da robot che operano sotto la guida degli astronauti”

ha spiegato Alin Albu-Schäffer, direttore del DLR Institute of Robotics and Mechatronics, il quale ha poi in seguito aggiunto:
“I nostri ultimi algoritmi di controllo e intelligenza artificiale consentono a un singolo astronauta di comandare un’intera squadra di robot diversi, che possono avere forme e funzioni diverse, come cani robot, umanoidi o rover.
Questo aumenta le possibilità di esplorazione e di scoperta, ma anche il senso di presenza e di coinvolgimento degli astronauti”.
Il progetto “Surface Avatar” è solo uno dei tanti esempi di come la ricerca e lo sviluppo di nuove tecnologie robotiche possano contribuire a rendere possibile e più efficace l’esplorazione spaziale, i robot sono infatti dei preziosi alleati degli esseri umani, che possono aiutarli a realizzare il loro sogno di conoscere e visitare i mondi lontani dal nostro.
Se sei attratto dalla scienza, dalla tecnologia, o vuoi essere aggiornato sulle ultime notizie, continua a seguirci, così da non perderti le ultime novità e news da tutto il mondo!




































{kind=link}