

Quando le parole “corda” e “cane” si incontrano, l’immagine più comune che affiora è quella di un compagno a quattro zampe trattenuto da un guinzaglio. Tuttavia, nell’ingegnoso progetto di Aaed Musa, denominato CARA, il concetto viene completamente sovvertito: qui, la corda è l’elemento propulsore, ciò che conferisce movimento al cane robot, anziché limitarlo.
CARA rappresenta l’ultima frontiera nella robotica hobbistica avanzata, essendo realizzato prevalentemente con parti stampate in 3D, integrate da motori brushless e, appunto, da corde che fungono da collegamento dinamico tra i motori e gli arti del robot.
CARA: dalla progettazione del riduttore al movimento su tre assi
La genesi di CARA ha avuto inizio con una profonda rielaborazione di un progetto preesistente di riduttore. Musa ha modificato questa base, impiegando tre motori per ciascuna zampa, riuscendo così a dotare ogni arto della capacità di muoversi su tutti e tre gli assi spaziali. Questa funzionalità avanzata richiede una precisione computazionale notevole: Musa ha dovuto eseguire un’ampia serie di calcoli di cinematica inversa.
Questi calcoli sono essenziali per tradurre il desiderato movimento della zampa – per esempio, la traiettoria di un passo – in specifici movimenti e angolazioni che i motori devono realizzare. Una volta definito con successo il complesso movimento di un singolo passo, l’attenzione si è spostata sulla costruzione dell’intera struttura del cane robot, assicurando che ogni componente lavorasse in armonia.
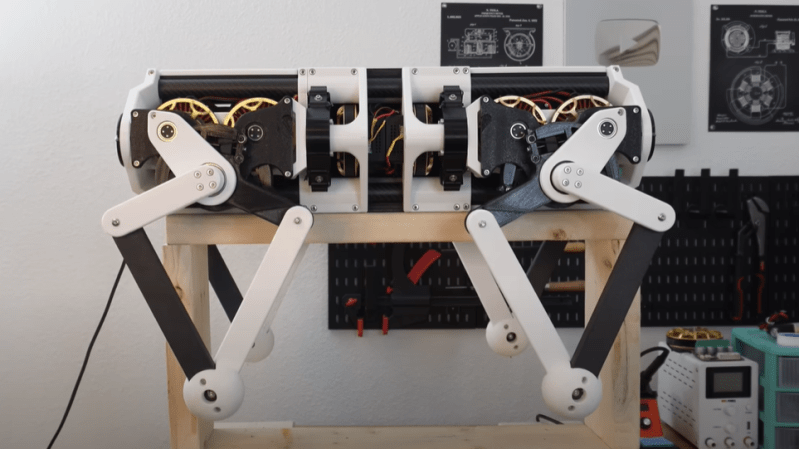
CARA si distingue per la sua costruzione intelligente, dove la stampa 3D gioca un ruolo centrale nella realizzazione della maggior parte delle sue componenti. Questa metodologia permette non solo una personalizzazione e prototipazione rapide, ma anche un controllo preciso sulla geometria delle parti.
Per garantire la necessaria rigidità strutturale e la stabilità complessiva del robot durante il movimento, il design integra diversi tubi in fibra di carbonio che si estendono per tutta la sua lunghezza. La combinazione di parti leggere stampate in 3D con la resistenza intrinseca della fibra di carbonio, unita all’efficienza dei motori brushless e all’innovativo sistema di trasmissione basato su corde, rende CARA un esempio affascinante di ingegneria robotica, aprendo nuove prospettive nel design di sistemi locomotori complessi.
Libertà e controllo avanzato
Il design innovativo di CARA si manifesta pienamente nella sua capacità di movimento. Le sue zampe, infatti, non sono vincolate a un semplice spostamento avanti e indietro, ma sono state progettate per muoversi liberamente in tutte le direzioni, inclusi i movimenti laterali, emulando la versatilità e l’agilità di un vero cane. Questa flessibilità è fondamentale per la navigazione in ambienti complessi e per un’andatura più naturale e adattabile.
Per garantire la necessaria potenza e precisione, il robot è equipaggiato con 12 grandi motori brushless, una configurazione che assicura la coppia elevata indispensabile per sostenere il peso e gestire i movimenti complessi. Ogni singolo motore è controllato con precisione tramite un controller motore ODrive S1.
Questi controller comunicano tra loro e con il cervello del robot attraverso una connessione CAN (Controller Area Network), una rete robusta e efficiente, gestita da un microcontrollore Teensy 4.1. Questo microcontrollore funge da centro nevralgico, coordinando i movimenti di ogni zampa in tempo reale e interpretando i dati provenienti dai sensori per garantire un’andatura stabile e responsiva.
A completare il sistema di percezione del robot, una piccola IMU (Inertial Measurement Unit) BNO086 è stata integrata per rilevare con accuratezza la posizione di CARA rispetto al campo gravitazionale. Questa informazione è cruciale per mantenere l’equilibrio e per permettere al robot di adattarsi a terreni irregolari o a cambi di inclinazione.
L’intera architettura elettronica è alimentata da una batteria per utensili cordless da 24 V, una soluzione pratica e ad alta energia che garantisce l’autonomia operativa necessaria per le sue complesse funzioni robotiche. Questa combinazione di motori potenti, controllo avanzato e feedback sensoriale permette a CARA di eseguire movimenti fluidi e dinamici, avvicinandosi sempre più alla capacità locomotoria di un organismo biologico.
La cinematica inversa
Una volta completata la fase di assemblaggio del robot CARA, l’attenzione del team si è spostata sulla cruciale ottimizzazione del tipo di movimento che le sue zampe dovevano eseguire durante la camminata. Questo processo ha richiesto un approccio iterativo, che ha visto l’implementazione di diverse modifiche ai componenti stampati in 3D. Queste revisioni erano necessarie per risolvere alcuni problemi strutturali emersi durante le prime fasi di test, garantendo una maggiore robustezza e affidabilità al design complessivo.
Con la struttura fisica affinata, il vero salto di qualità nell’andatura di CARA è stato raggiunto attraverso l’applicazione intensiva di calcoli di cinematica inversa. Questo approccio matematico complesso permette di determinare come i motori debbano muoversi per ottenere una specifica posizione o traiettoria della zampa desiderata. L’integrazione di questi calcoli con i dati forniti dalla IMU (Inertial Measurement Unit) a bordo di CARA ha rappresentato un elemento chiave.
Sfruttando pienamente le informazioni sulla posizione e l’orientamento del robot rispetto alla gravità, l’IMU gli ha permesso di non solo camminare su superfici piane, ma anche di gestire efficacemente le pendenze, adattando dinamicamente il suo stile di movimento. Questo ha portato a un’andatura notevolmente più naturale e fluida, emulando in modo più realistico il movimento di un quadrupede biologico.
Aaed Musa, il cervello dietro questo progetto, ha dimostrato un notevole ingegno nel suo approccio, e ha condiviso dettagli approfonditi della sua metodologia sia sul suo sito web che attraverso un video dimostrativo. Questi materiali offrono una preziosa panoramica delle problematiche superate e delle soluzioni innovative adottate. L’intera comunità della robotica attende con impazienza di scoprire quali saranno i suoi prossimi affascinanti progetti.
Per maggiori informazioni, visita la pagina ufficiale del progetto CARA.




































{kind=link}